近日,由国际农业和生物系统工程委员会、中国农业机械学会、中国农业工程学会、省部共建现代农业装备与技术协同创新中心、农业工程大学国际联盟共同主办的“天鹅杯”第九届国际大学生智能农业装备创新大赛在石河子大学举行。人工智能学院推报的参赛项目从中国农业大学等118所高校的1203项参赛作品中脱颖而出,斩获特等奖3项、一等奖1项、二等奖4项,刷新学院学生参加本项赛事以来的最好成绩,为学校捧回大赛“优胜杯”。

第九届国际大学生智能农业装备创新大赛以“创新赋能农装,智能引领未来”为主题,以培育行业亟需的“专业知识雄厚、动手能力较强、创新创业能力过硬”的现代农业装备创新创业人才为目标,对促进农业装备领域人才培养,提升大学生工程创新能力和实践应用能力,激发大学生热爱农业装备科学、投身农业装备研发具有重要的意义。据悉,大赛2023年成功入选“全国普通高校大学生竞赛排行榜”,成为农业工程领域唯一入选、具有广泛影响力的权威科创赛事。
比赛现场,我院参赛选手们展示了一系列根植实际、贴近前沿、创意新颖的智能农机装备作品,提出了智能农业装备领域的新想法和新思路,以及解决农业生产问题的更高效和更智能的方案。

《种子表型多参数自动检测流水线系统》
团队成员:周婷婷,陈宣羽,阚婉宁,冯继伟,徐浩然
特等奖作品《种子表型多参数自动检测流水线系统》利用机器视觉和深度学习算法,结合单片机、传感器、工业相机等硬件设备,自主设计并构建了一套动态智能考种系统。该系统不仅能够对大豆种子萌发环境进行实时监控和调整,还能够提取种子萌发过程中的关键表型参数(面积、周长、长轴、短轴、长宽比和圆形度)。此外,该系统还能够实现子叶与幼苗的自动分离、主根与侧根的区分,并对断根进行修复处理,从而精确获取根系生长参数(幼苗长度、幼苗平均宽度、幼苗面积和侧根数量)。基于这些动态时间序列数据,系统进一步利用长短期记忆网络(LSTM)建立种子活力评估模型,从而选取出高活力、萌发效果好的种子,生长出更具抗性的幼苗,进而提高农作物的产量。
《设施蔬菜精准施肥播种机器人》
团队成员:游雨欣,刘子轩,段骞浩,左瑞佳,陈奕萌
特等奖作品《设施蔬菜精准施肥播种机器人》针对目前设施蔬菜作业效率不高、精度偏低、作业质量严重依赖操纵人员经验、智能化水平较低、关键核心部件缺乏等问题,从智能行走作业平台、精准定位播种、可控施肥作业、作业状态监测等方面出发,紧密结合生产效率提升与生产要素实际现状,以智能、高效、精准为目标,开展设施蔬菜精准施肥播种关键技术与装备研发,满足设施蔬菜规模化生产对智能高效施肥播种作业装备的需求,大幅提高我国设施蔬菜精准施肥装备的智能化程度与技术水平,提高生产作业效率,减少化肥使用量,降低生产成本,减轻劳动强度,改善劳动环境。

《基于并联转刀机构的太阳能混动型株间除草机器人》
团队成员:林洪宇,赵子楠,赵宇超,郑开清,张申龙
特等奖作品《基于并联转刀机构的太阳能混动型株间除草机器人》以太阳能为驱动主能源,可利用太阳能-蓄电池混合系统根据要求和实际情况自主切换供电模式来降低能耗;该机器人利用视觉对农作物行间的惯性导航算法进行除草路径规划,采用轻量级神经网络完成识别植株,同时其现有除草机构及控制算法得到了改进,进一步降低了伤苗率。四驱独立转向的设计,使其具有高动力性能和良好的移动能力,实现了智能转向、自主导航、可面向多种大田环境进行行间、株间精准破土除草作业的功能,具有高机动性、智能化、高效率的特点。
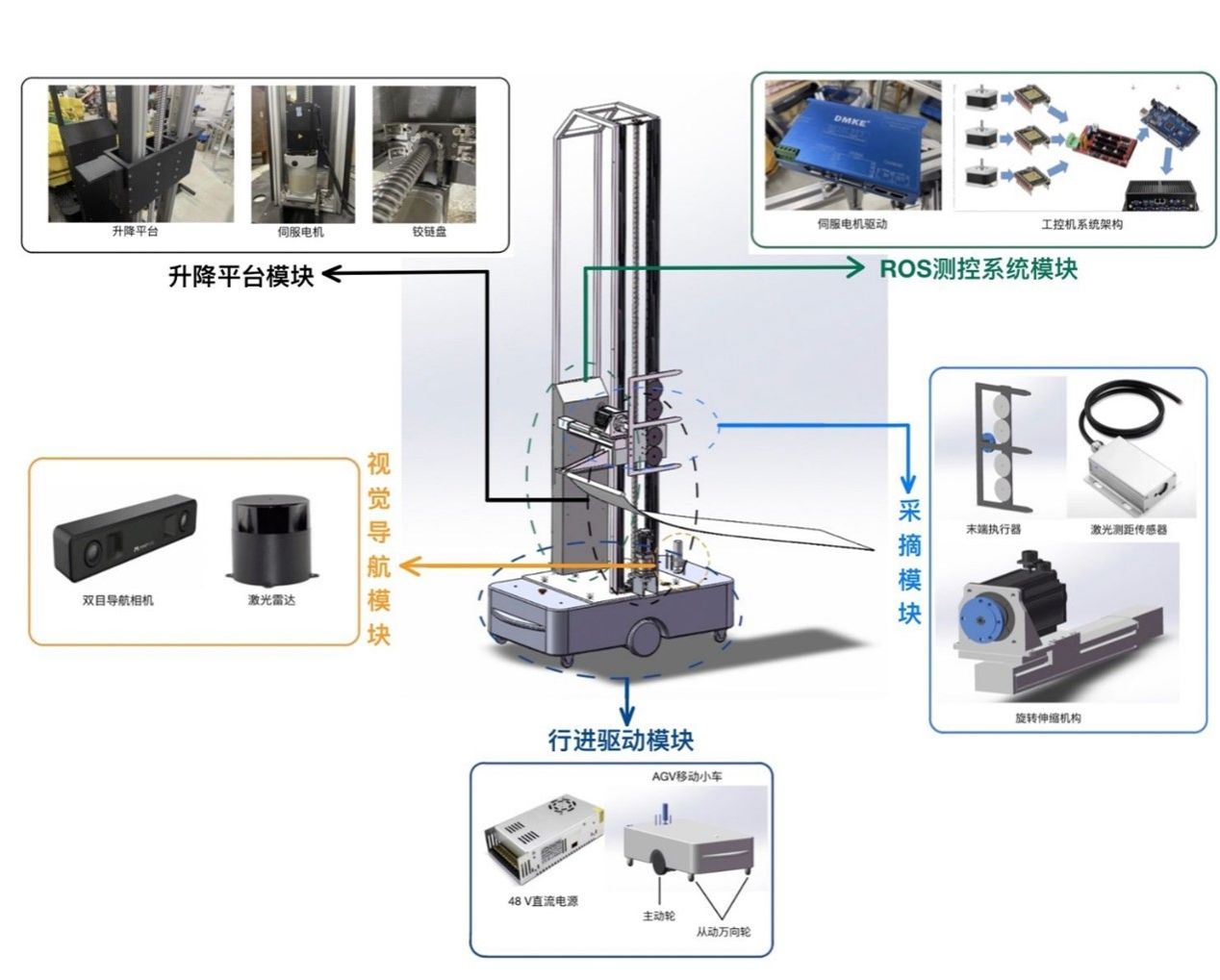
《杏鲍菇收割机器人》
团队成员:吕宁,刘威,王兆东,尹思凡,李声宇
一等奖作品《杏鲍菇收割机器人》具有遍历多层菇床、自主导航对刀、高效无损采摘、协同控制等功能。以水平生长的袋栽杏鲍菇为采摘对象,针对工厂化种植,模块化设计杏鲍菇收割机器人,包括:AGV移动升降平台、四格旋转伸缩收割手爪、视觉导航系统、视觉自适应切割控制系统以及ROS测控系统。
《面向智慧农业的无人机-地面机器人协同地图创建与作业路径规划》
团队成员:卞一帆,曹广政,白雷靖,梁芝燕,王梓同
二等奖作品《面向智慧农业的无人机-地面机器人协同地图创建与作业路径规划》设计了一套无人机-地面机器人协同地图创建与作业路径规划系统。首先搭载3D BOX设备的地面机器人使用改进的LeGO-LOAM算法建立周围环境的三维点云地图,改进后的LeGO-LOAM算法加入了重定位模块,用于减少累积的位姿误差。同时搭载旋转slam设备的无人机平台从空中获得360°×360°农业场景的三维数据,建立空中点云地图。二者在ROS系统中通过订阅同一话题获得各自地图信息,并使用改进的ICP算法或Cloudcompare软件将二者的点云进行配准,实现地图融合。最后在融合的地图上采用改进的Open Planner算法实时生成16条局部路径,从中选择最优路径以实现复杂环境中的安全导航。

《吞咽式机械手设计及高速并联采摘机器人系统集成开发》
团队成员:李阳,李想,娄元欣
二等奖作品《吞咽式机械手设计及高速并联采摘机器人系统集成开发》设计并优化了基于柔性仿生鳍条的末端吞咽式自适应机械手,采用了结构稳定的三轴高速并联机械臂结构配合机械手完成协同控制,设计了“夹紧-扭转-吞咽”的一体化采摘策略,搭建了果蔬无损采摘视觉识别系统,实现了果实的高效无损采摘,继续探索农业智能化与自动化领域的应用。

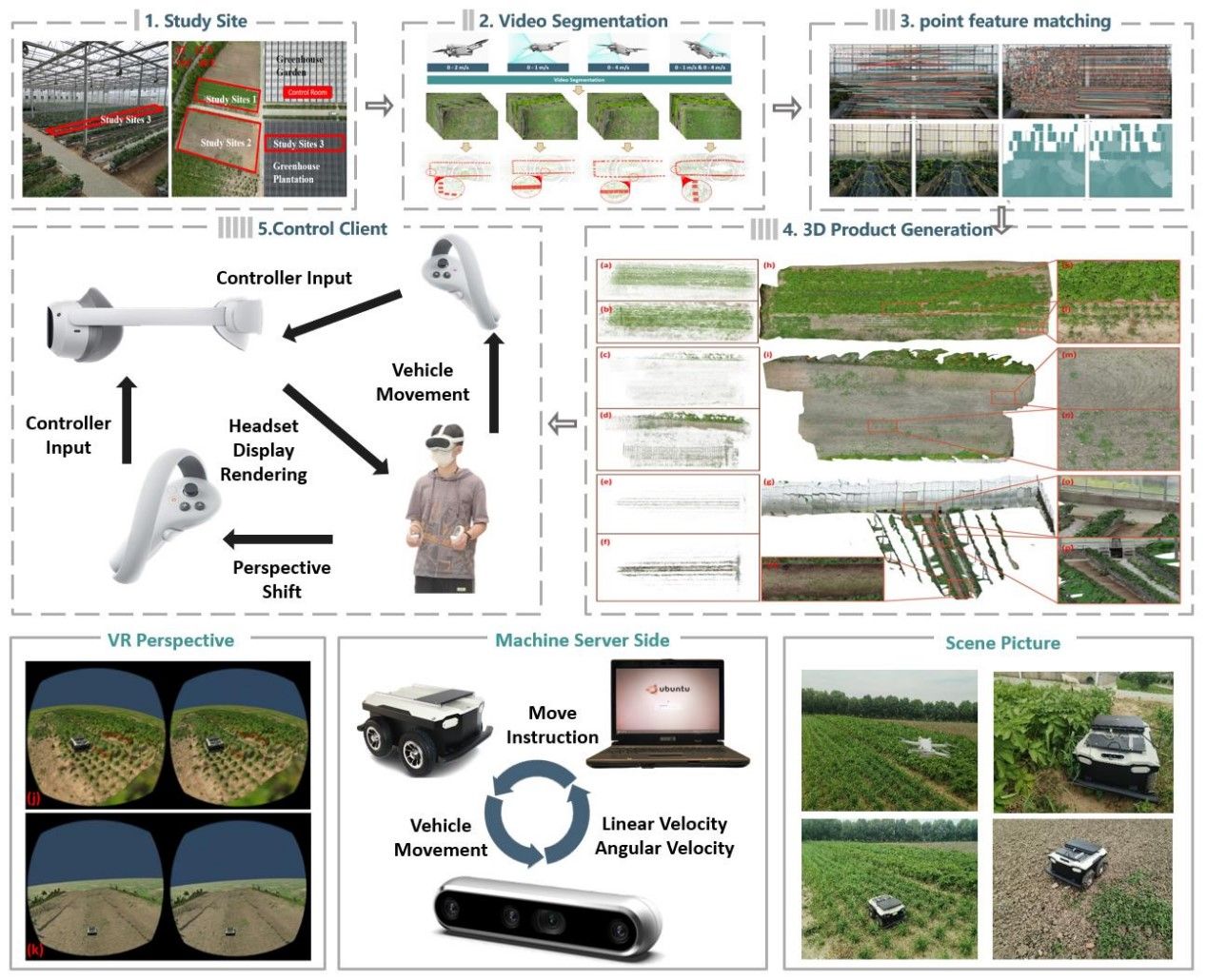
《基于VR与双目视觉的农业机器人沉浸式远程遥操作系统开发》
团队成员:曹广政,卞一帆,白雷靖,王磊
二等奖作品《基于VR与双目视觉的农业机器人沉浸式远程遥操作系统开发》针对农业环境非结构化问题,结合三维重建和虚拟现实技术,设计了一个沉浸式远程人机交互控制系统。项目结合了激光雷达和视觉传感器进行真实场景数据获取,在将环境数据处理优化、渲染更新后,实现虚拟现实场景的三维重建;利用VR 设备设计了一个沉浸式人机交互界面,实现沉浸式虚拟场景可视化和以第一视角遥操作机器人运动,便于完成各项复杂作业。
《跨垄式棉花变量播种机器人》
团队成员:刘威,吕宁,殷江帆,冯小航,尹思凡
二等奖作品《跨垄式棉花变量播种机器人》为改善人工播种劳动力投入大的问题,设计出一款基于STM32的全自动播种机器人。该机器人可分为三个部分:行走系统、播种系统、二维云台定位系统。通过可编程摄像头OpenMv,识别播种板的种类,并将播种板的视觉坐标与视觉的中心坐标做比较,结合PID算法,得到二维云台的各个关节电机的控制量,从而瞄准播种板中心,实现闭环控制,做到精准播种。
我院学生通过本次大赛进一步认识到丰富多元的科技创新内涵,既充分展示了参赛团队的智慧与成果,也启发和激励了更多青年学生积极参加人工智能类竞赛。人工智能学院持续推动创新工作与教学科研、社会需求相融合,面向全体学生开展“全景式”科创启蒙教育,邀请校内外专家学者开展本科生科研创新沙龙,依托AI工坊九个工作室,组织朋辈引航、应用培训、专业竞赛等,交流促学、以赛促建,营造精细化、特色化科研创新氛围。未来,学院将深耕优势项目培育,结合职业梦实习体验计划,推动本科生有组织的科研创新和高素质创新人才的培育。







 当前位置:
当前位置: