智慧农业学院|舒磊教授团队在视觉花朵计数研究方面连续取得新进展
近日,南京农业大学智慧农业学院舒磊教授团队撰写的综述论文“Visual-Based Flower Counting: Techniques and Applications”被国际期刊《IEEE/CAA Journal of Automatica Sinica》录用,论文DOI为10.1109/JAS.2026.126050。同时,团队围绕菊花移动平台实时计数开展的研究论文“VTC-TrackBot: A Robust Spatiotemporal Framework for Real-Time Chrysanthemum Counting on Mobile Edge Devices”被《IEEE Transactions on AgriFood Electronics》录用,论文DOI为10.1109/TAFE.2026.3688647。《IEEE/CAA Journal of Automatica Sinica》(简称 IEEE/CAA JAS)由国际电气与电子工程师协会(IEEE)和中国自动化学会(CAA)联合主办,是自动化与控制领域具有重要国际影响力的高水平学术期刊。该期刊创刊于2014年,主要刊发自动化、控制科学、人工智能、机器人、智能系统等方向的原创性研究成果。根据期刊官网发布的最新Journal Citation Reports(JCR)数据,其2024年影响因子为19.2,在Automation & Control Systems类别中排名第1位(1/89),位列SCI Q1;同时,期刊CiteScore 为28.2,处于相关学科前1%。《IEEE Transactions on AgriFood Electronics》是IEEE旗下聚焦农业与食品电子技术领域的重要学术期刊,主要刊发智慧农业感知、农业机器人、智能装备与边缘电子系统等方向的研究成果。论文第一作者为智慧农业学院博士研究生臧思扬,通讯作者为智慧农业学院舒磊教授。该研究得到农业农村部园林植物种质创新与利用重点实验室基金(No. KFL202402)资助。
针对当前农业视觉花朵计数研究缺乏系统性综述、技术脉络尚不清晰的问题,该论文首次从综述层面对该领域进行了系统梳理,并提出了面向视觉花朵计数研究的“双维分析框架”新观点。具体而言,论文从观测平台和数据形态两个维度重新组织该领域的技术体系:在观测平台维度上,将现有研究归纳为空中平台和地面平台两类;在数据形态维度上,将相关方法概括为基于静态图像的离散计数和基于动态视频、多视角信息的连续计数两类路线。在此基础上,论文进一步从感知精度、作业效率、实时性、覆盖范围和部署成本等方面,系统分析了不同技术路线之间的权衡关系及其适用边界。例如,空中平台具有覆盖范围大、作业效率高的优势,但在分辨率和小目标识别精度方面面临限制;地面平台虽然能够获得更高精度和更丰富的局部表型信息,但作业效率和通行能力又受到约束。该研究不仅填补了视觉花朵计数领域缺乏专门综述的空白,也推动相关研究由单一算法比较转向面向复杂农业场景的系统性认知,为后续模型设计、平台选择和智慧农业装备部署提供了理论参考。
与综述论文侧重领域梳理和框架构建不同,另一篇录用论文进一步面向田间移动作业场景,将菊花计数任务拓展到复杂振动条件下的检测、跟踪与时空计数问题。论文提出VTC-TrackBot轻量化时空计数框架,在搭载NVIDIA Jetson Xavier NX的自研移动机器人平台上实现23 FPS实时运行,计数决定系数R2达到0.983,平均相对误差仅为4.14%。该成果表明,团队不仅从技术层面系统梳理了视觉花朵计数的技术路线与权衡关系,也在地面移动平台上进一步验证了实时感知与边缘部署的可行性。
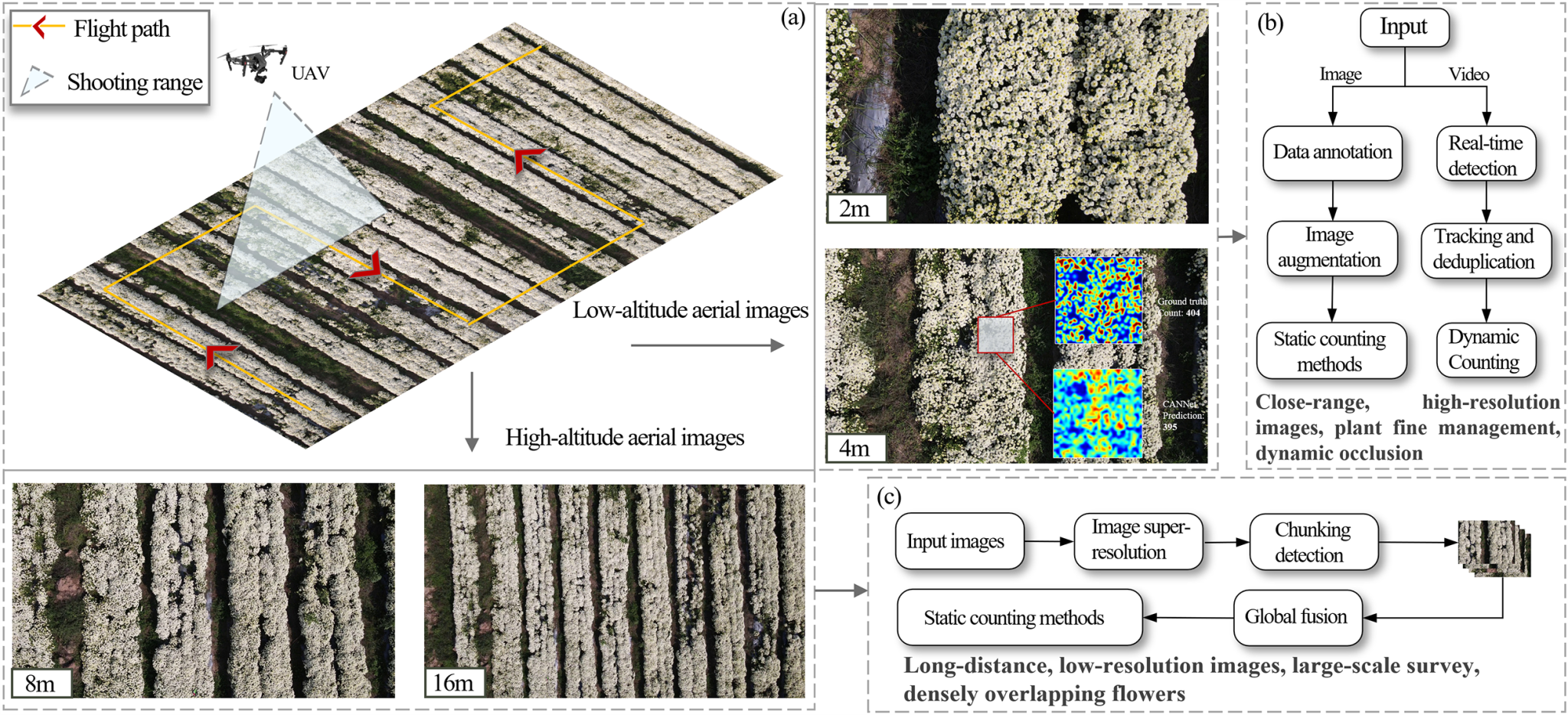
图2. 从低空跟踪到高空密度估计:无人机花朵计数策略对比研究。(a) 无人机数据采集流程;(b) 面向低空(2-4米)场景的动态检测与跟踪流程;(c) 面向高空(8-16米)场景的超分辨率重建与基于图像块的检测流程。
此次两篇论文在四月份连续录用,并非源于某一项单点研究的偶然突破,而是团队围绕菊花相关课题持续积累、逐步深化后的集中体现。近年来,依托“面向茶菊高效采收机械的核心问题研究”“茶用菊宜机化栽培关键技术研究与采收装备研制”等项目,团队持续围绕茶菊生产中的感知与装备需求开展研究,并在此基础上逐步拓展到花期识别、生长信息采集、花朵识别与计数、无人机监测以及产量估算等方向。与此同时,团队本科生还围绕“基于机器视觉的茶菊花朵识别和计数研究”开展SRT项目,进一步丰富了相关研究储备。正是在这样持续推进的基础上,团队逐步形成了对视觉花朵计数技术体系及其应用场景的系统性认识。这也进一步体现了团队围绕菊花视觉感知研究由理论总结向系统实现持续延伸的研究态势。
从时间脉络看,团队围绕菊花视觉感知的研究是逐步推进并持续深化的。2021年,戚超等在《Agronomy》发表茶菊早花期识别研究,提出F-YOLO模型,用于田间环境下茶菊早花期检测,较早从生产实际中的花期判别问题切入相关研究 [1] 。2022年,团队围绕复杂环境下的菊花目标检测继续推进,相继在《Expert Systems with Applications》《Frontiers in Plant Science》和《Plants》发表研究成果,分别针对非结构化环境下茶菊检测 [2] 、生成增强与边缘计算支持下的茶菊识别 [3] ,以及复杂环境中的药用菊花检测等问题开展探索 [4] ,逐步拓展了团队在复杂场景目标感知方面的研究基础。同年,团队还在IEEE Dataport公开发布茶菊图像数据集,并于2023年以“Image dataset of tea chrysanthemums in complex outdoor scenes”为题在《Frontiers in Plant Science》发表数据论文 [5] ,构建了面向复杂室外场景的茶菊数据资源。此后,团队进一步将研究拓展至无人机平台下的茶菊检测与计数、苗情动态监测及多源数据应用。其中张菲娅开展了基于UAV和超分辨率重建的茶菊检测与计数研究,姚泽涛继续推进基于计算机视觉的UAV挂载切花菊劣质苗动态监测与预警装备研究。2025年,金乃赟等在《Electronics》发表基于太阳能杀虫灯的作物生长信息采集系统研究,进一步完善了田间生长信息获取技术 [6] ;同年,戚超等在《Journal of Field Robotics》发表茶菊早期花朵计数研究成果 [7] ,臧思扬等在IEEE ICIT发表复杂室外场景下茶菊实时检测研究成果 [8] ,推动团队由目标识别进一步迈向花朵计数与实时感知应用。在此基础上,团队又进一步拓展到多源数据驱动与无人机飞行策略协同的园林小菊产量估算研究。上述工作彼此衔接、逐步深入,构成了团队围绕菊花视觉感知持续推进的研究链条,也为此次综述论文的形成与录用奠定了坚实基础。
在长期研究基础上,团队构建并公开发布了首个面向复杂室外场景的茶用菊花图像数据集。相关成果以“Image dataset of tea chrysanthemums in complex outdoor scenes”为题发表于《Frontiers in Plant Science》,并同步发布于IEEE Dataport [9] 。该数据集覆盖6类茶菊品种,采用3种拍摄视角,采集于遮挡、重叠、阴影、逆光和直射光等多种复杂田间条件下,共包含81276幅图像和453段视频,为复杂环境下茶菊检测、计数、跟踪及边缘端部署研究提供了重要的数据基础。
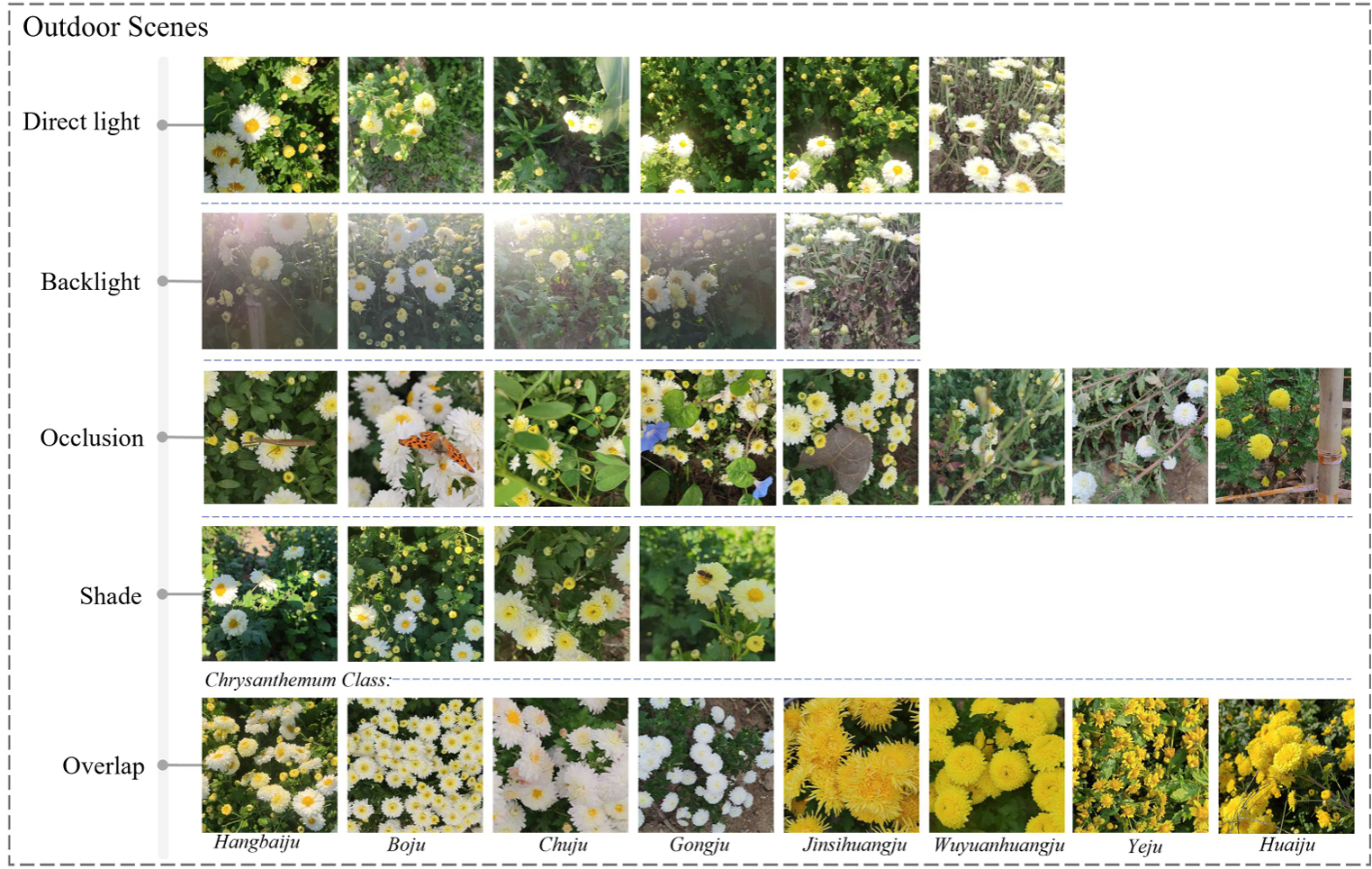
图3. 五种不同室外场景下的菊花图像
也正是在菊花场景中从问题提出、项目布局、数据积累到模型验证和平台应用的持续推进,使团队能够从单一作物、单一任务进一步上升到对视觉花朵计数领域的系统认识。综述论文中的两个典型案例研究,正体现了这种从具体问题走向共性方法的研究思路。第一个案例聚焦无人机平台花朵监测,系统分析了无人机在果园和大田场景中的应用特点,指出无人机平台虽然具有覆盖范围广、机动性强、适合大尺度快速巡检等优势,但同时面临飞行高度与观测精度之间的权衡:飞行高度提高有助于提升作业效率和覆盖范围,却会降低图像分辨率和小目标识别能力,从而影响花朵计数精度。第二个案例聚焦地面移动机器人平台,指出该平台虽然能够近距离、多角度、高分辨率获取花朵表型信息,更适合复杂冠层内部和局部精细化监测,但在实际应用中又必须处理模型运行时延、设备算力受限和复杂环境鲁棒性之间的矛盾。上述分析不仅总结了现有技术路线的应用边界,也为智慧农业装备的场景化部署提供了理论参考。此次录用的VTC-TrackBot研究,正是团队围绕地面移动平台花朵计数开展的进一步实践验证。
论文认为,未来视觉花朵计数研究将进一步朝着多模态感知、跨场景自适应、轻量化模型设计、空地协同感知以及数字孪生和农业元宇宙融合应用等方向发展。相关研究将为作物花期识别、表型分析、产量预测和智慧农业装备智能化提供更加坚实的理论基础与技术支撑。
[1]Qi C, Nyalala I, Chen K. Detecting the early flowering stage of tea chrysanthemum using the F-YOLO model[J]. Agronomy, 2021, 11(5): 834. DOI: 10.3390/agronomy11050834.
[2]Qi C, Gao J, Pearson S, et al. Tea chrysanthemum detection under unstructured environments using the TC-YOLO model[J]. Expert Systems with Applications, 2022, 193: 116473. DOI: 10.1016/j.eswa.2021.116473.
[3]Qi C, Gao J, Chen K, et al. Tea chrysanthemum detection by leveraging generative adversarial networks and edge computing[J]. Frontiers in Plant Science, 2022, 13: 850606. DOI: 10.3389/fpls.2022.850606.
[4]Qi C, Chang J, Zhang J, et al. Medicinal chrysanthemum detection under complex environments using the MC-LCNN model[J]. Plants, 2022, 11(7): 838. DOI: 10.3390/plants11070838.
[5]Zang S, Shu L, Huang K, et al. Image dataset of tea chrysanthemums in complex outdoor scenes[J]. Frontiers in Plant Science, 2023, 14: 1134911. DOI: 10.3389/fpls.2023.1134911.
[6]Jin, N.; Hu, T.; Shu, L.; Zang, H.; Li, K.; Han, R.; Yang, X. A crop Growth Information Collection System Based on a Solar Insecticidal Lamp. Electronics 2025, 14, 370. https://doi.org/10.3390/electronics14020370.
[7]Qi C, Chen K, Gao J. A vision transformer‐based robotic perception for early tea chrysanthemum flower counting in field environments[J]. Journal of Field Robotics, 2025, 42(1): 65-78. DOI: 10.1002/rob.22398.
[8]Zang S, Shu L, Han R, et al. Real-Time Detection of Tea Chrysanthemums in Complex Outdoor Scenes[C]//2025 IEEE International Conference on Industrial Technology (ICIT). IEEE, 2025: 1-8. DOI: 10.1109/ICIT63637.2025.10965216.
[9]Zang S, Shu L, Huang K, et al. Image dataset of tea chrysanthemums in complex outdoor scenes [DS/OL]. IEEE Dataport, 2022. DOI: 10.21227/vc18-rv06.







 当前位置:
当前位置: