近日,由中国机器人及人工智能大赛组委会、江苏省宜兴市人民政府主办的第二十六届中国机器人及人工智能大赛全国决赛在宜兴市窑湖小镇举行。人工智能学院推报的参赛项目从清华大学等208所高校的参赛作品中脱颖而出,斩获一等奖等多项荣誉。

第二十六届中国机器人及人工智能大赛本届大赛构建了“1+4+1”赛、会、展一体的综合性赛事体系,涵盖1场核心赛事,4场专业论坛——机器人新质生产力产学研对接会、论坛、路演、“新质驱动·产教共融”创新实践人才培养研讨会,以及1场专精尖机器人企业展,汇聚了包括2位院士、5位国家杰出青年科学基金获得者在内的50余位权威专家学者,旨在为机器人及人工智能领域的专家、学者、优秀参赛选手提供交流创新成果、探索合作机遇的窗口。据悉,中国机器人及人工智能大赛始于1999年,是一项历史悠久、规模宏大、影响广泛的全国性机器人竞赛,连续被列入中国高等教育学会发布的《全国普通高校大学生竞赛分析报告》竞赛目录。
《面向智慧农业的无人机-地面机器人协同地图创建与作业路径规划》
指导教师:张保华
团队成员:卞一帆,白雷靖,彭烨
赛道/赛项:应用赛/机器人应用赛(智慧农业)
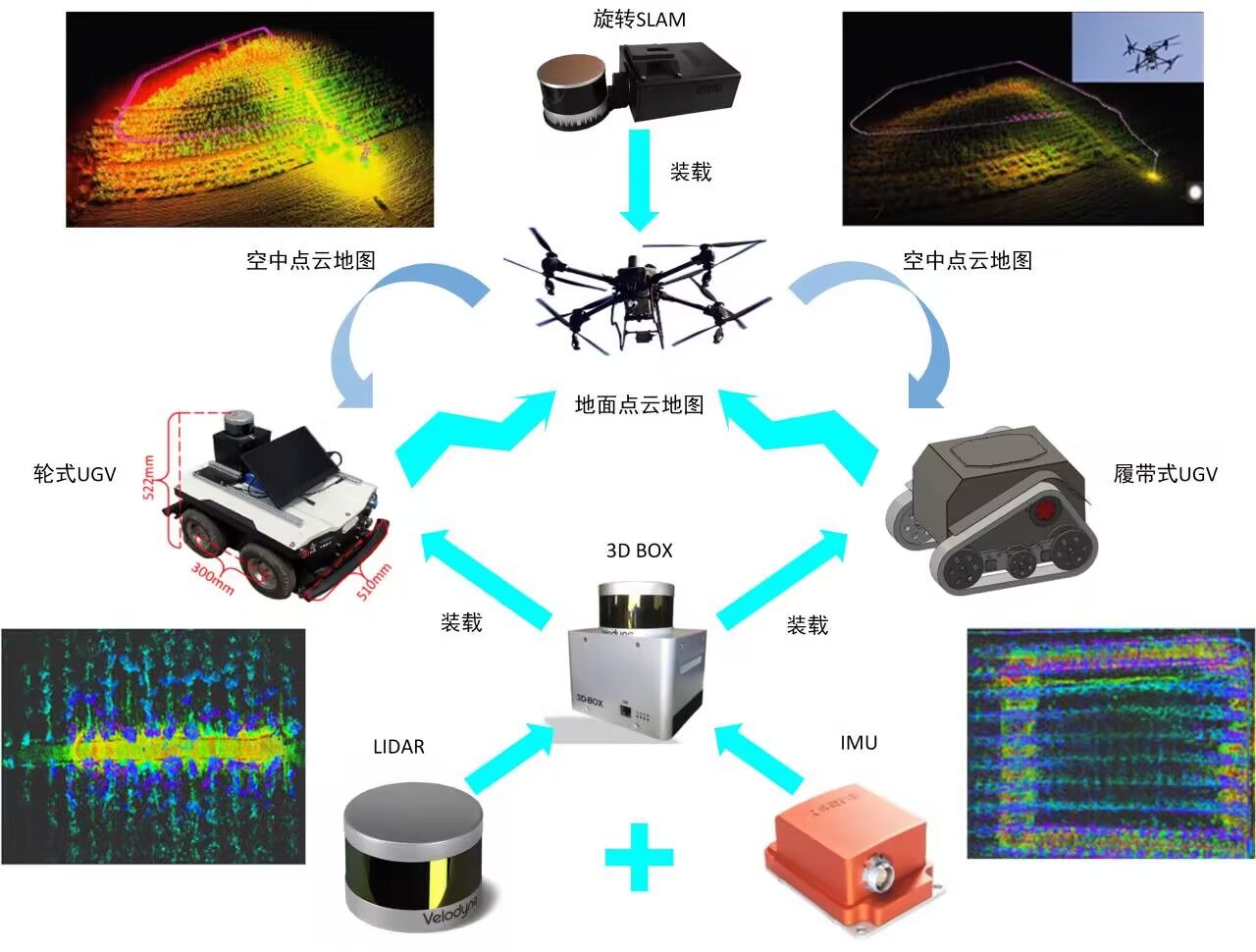
一等奖作品《面向智慧农业的无人机-地面机器人协同地图创建与作业路径规划》设计了一套无人机-地面机器人协同地图创建与作业路径规划系统,即地面机器人和无人机分别建立各自点云地图,进行点云配准和地图融合,最终在融合的地图上采用改进的路径规划算法实现UGV自主导航。为了测试系统的建图和路径规划的效果,小组成员分别在温室和果园开展相关实验,控制UGV移动在温室和果园中移动,建立不同环境的高精三维点云地图。通过改进的路径规划算法成功使得UGV所有避开障碍物,实现安全自主导航。本项目未来可发展应用于农田协同喷洒、果园协同采摘等智慧农业项目,对节省人力资源、提高农业机器人的工作效率具有重要意义。
《基于激光技术的太阳能混动型棉花打顶机器人》
指导教师:卢伟、蹇兴亮
团队成员:郑开清、赵子楠、秦瑞龙
赛道/赛项:创新赛/新质生产力创新设计专项赛

二等奖作品《基于激光技术的太阳能混动型棉花打顶机器人》以太阳能为驱动主能源,利用视觉惯性耦合导航算法进行路径规划,采用轻量级神经网络实现对棉花的识别与定位,借助高效节能、绿色环保的激光技术实现对棉花顶端的定向生长抑制,具有自动化、高机动性、绿色节能的特点。该四驱独立转向平台配备有水田轮高地缝结构,利用太阳能-蓄电池混合系统供能,可根据功率实时要求和锂电池剩余电量自动切换供电模式,能有效提高作业机动性和续航性能,降低能源消耗,为农业产业新质生产力发展提供新思路。
《基于数字孪生的智慧菇房环境参数可视化系统》
指导教师:卢伟
团队成员:徐浩然、田志昊、刘钰
赛道/赛项:创新赛/新质生产力创新设计专项赛
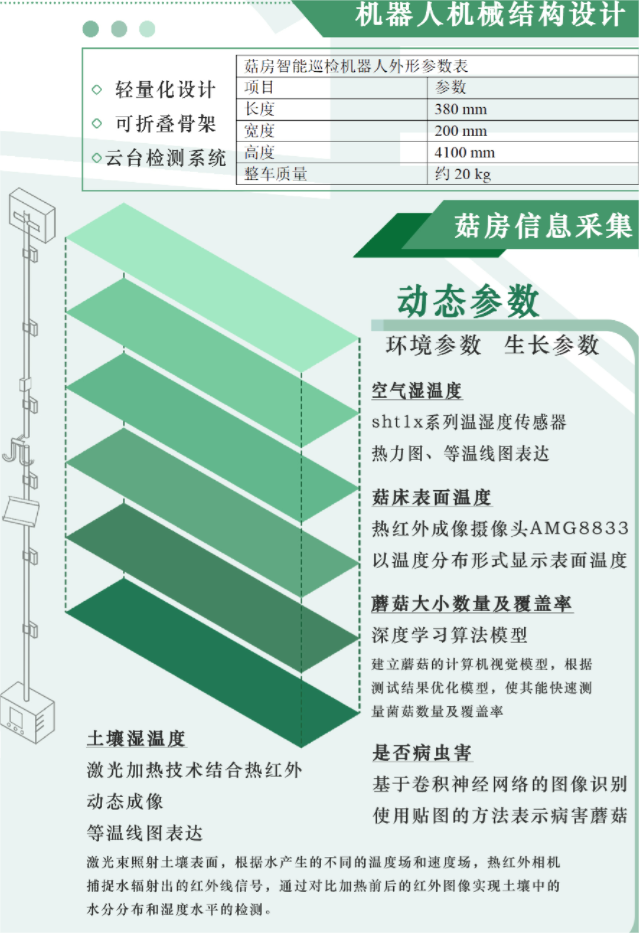
二等奖作品《基于数字孪生的智慧菇房环境参数可视化系统》利用数字孪生技术和无损检测技术,结合单片机、传感器、工业相机等硬件设备,自主设计并构建了一套智慧菇房环境参数可视化系统。该系统不仅可以对蘑菇生长环境进行实时检测,还能检测蘑菇的病害情况;利用UE4构建一个虚拟的菇房模型,通过巡检机器人检测传输数据,基于历史数据和检测数据给出环控策略,并提前发出预警,使管理员可以直观了解菇房环境与蘑菇的生长状况,为菇房的管控与优化提供更多依据。
《动态智能考种系统》
指导教师:卢伟
团队成员:陈宣羽、周婷婷、沈豪杰
赛道/赛项:创新赛/人工智能创新赛
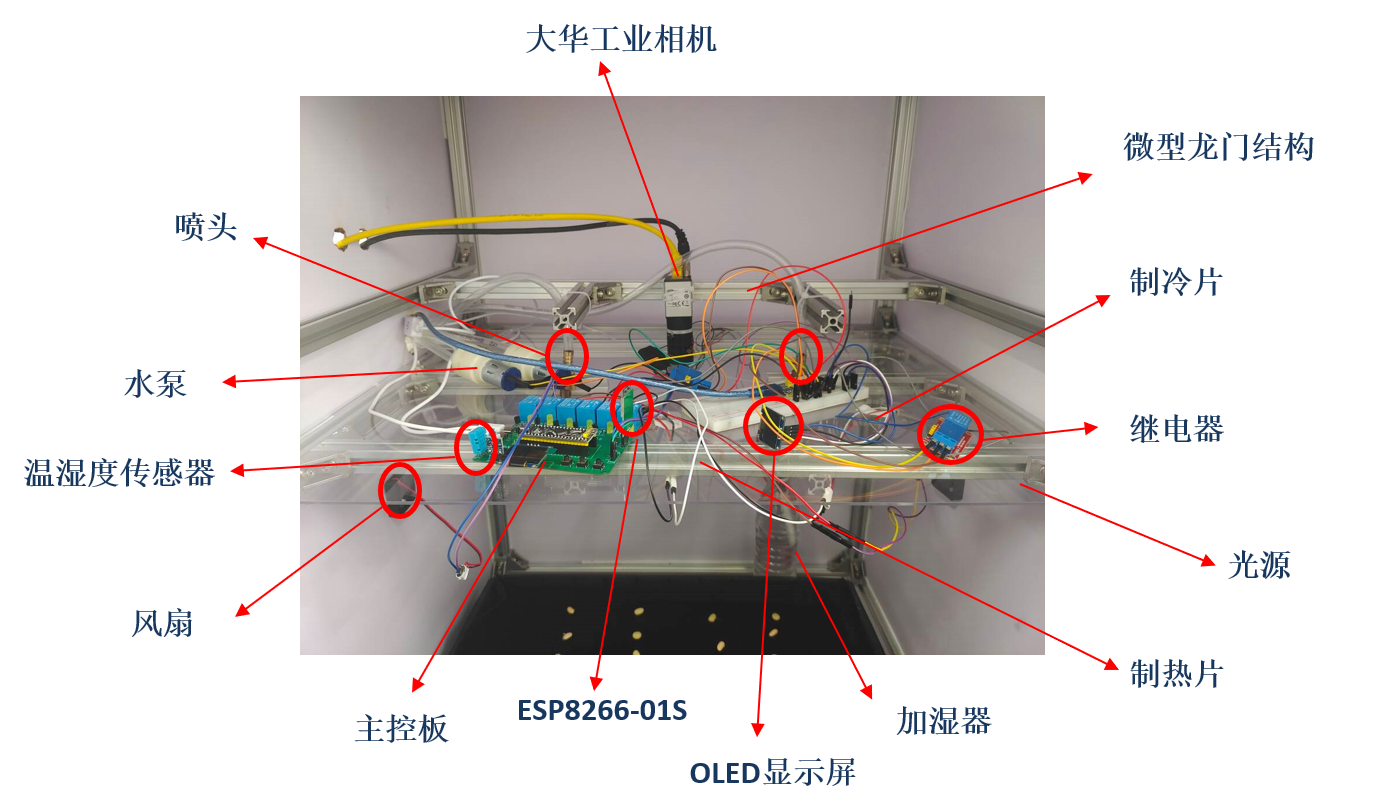
三等奖作品《动态智能考种系统》是基于机器视觉和深度学习,结合单片机、传感器、工业相机等硬件设备构建的动态智能考种系统。不仅可以实现对大豆种子萌发环境的实时控制,还可以获取种子萌发过程中的表型参数(长、宽、长宽比、面积、周长、圆形度)和根系生长参数(幼苗长度、幼苗平均宽度、幼苗面积、侧根数量),并根据上述动态时间序列数据对种子进行活力预测。
我院学生通过本次大赛进一步认识到丰富多元的科技创新内涵,既充分展示了参赛团队的智慧与成果,也启发和激励了更多青年学生积极参加人工智能类竞赛。人工智能学院持续推动创新工作与教学科研、社会需求相融合,面向全体学生开展“全景式”科创启蒙教育,邀请校内外专家学者开展本科生科研创新沙龙,依托AI工坊九个工作室,组织朋辈引航、应用培训、专业竞赛等,交流促学、以赛促建,营造精细化、特色化科研创新氛围。未来,学院将结合“工坊伴航”计划,深耕优势项目培育,推动本科生有组织的科研创新和高素质创新人才的培育。
本赛事获奖信息受到学校宣传部和招办的关注和报道。







 当前位置:
当前位置: